- Messages
- 3,134
- Name
- Mark
- Edit My Images
- No
Hi,
I have been looking at UAV or Drones or Multicopters for a while now, and after what has felt like an age doing research etc, I am now ready to start the build,
I have decided upon a Hexacopter (6 motors), this gives me a great power to weight ratio and stability, and has to be capable of carrying large battery, gimbal and a Canon 5D2 with 24mm f2.8 IS USM lens, Im not building it primerally for video or I would have chosen a smaller frame and either a go pro or Black magic camera, I want to use it for photography as well.
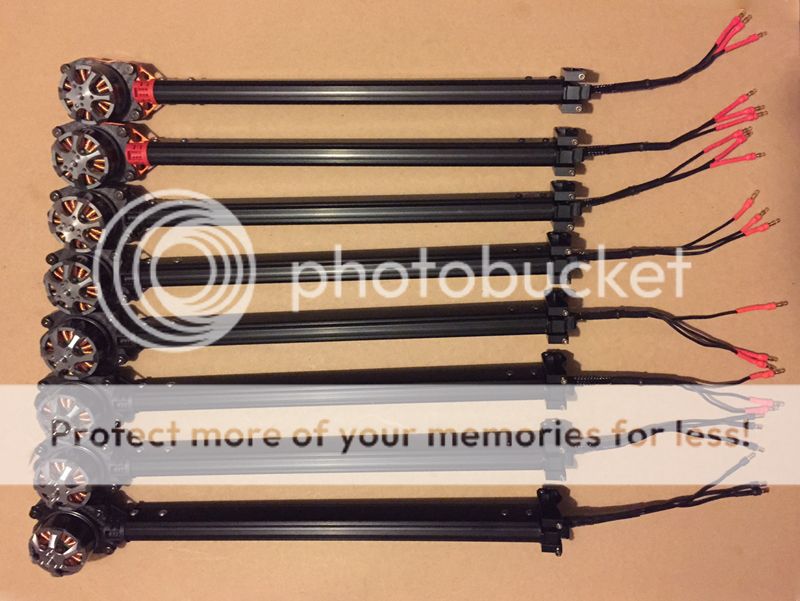
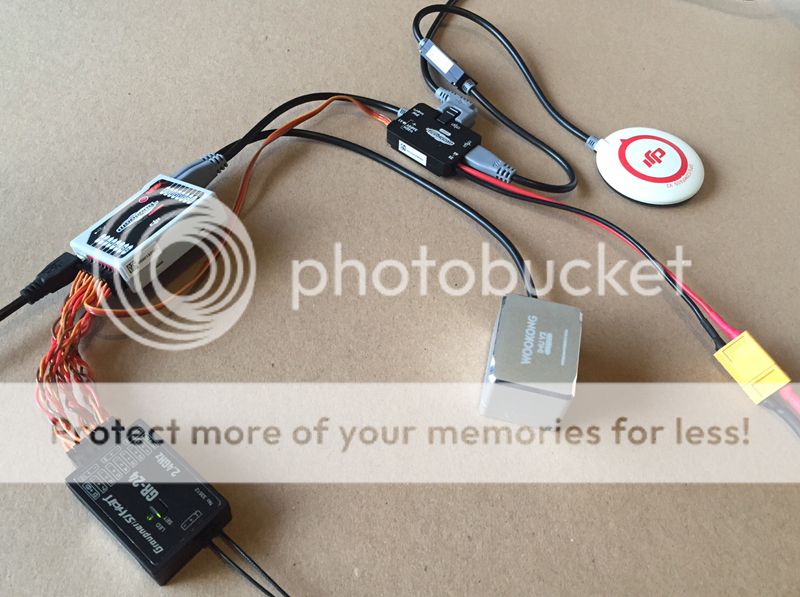
So I got the chance to buy a Tarot 960 complete with motors, Esc, wiring, retractabe legs, DJI Naza M v2 flight controller and GPS, props etc for a whole let less than buying new, this has been stripped and the DJI Naza M v2 will be changed for the DJI Wookong M, this will enable me to fit the fantastic DJI Zenmuse Z15-5D Gimbal.
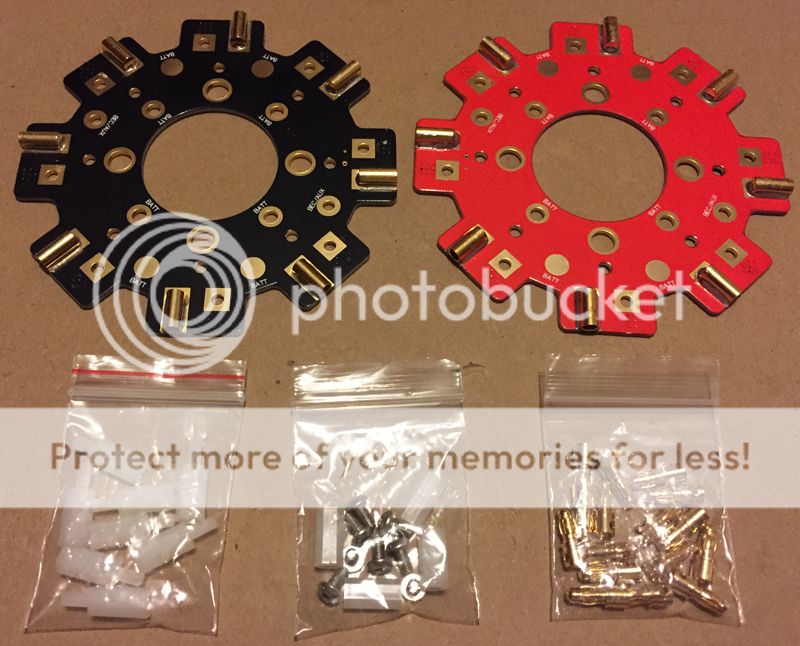
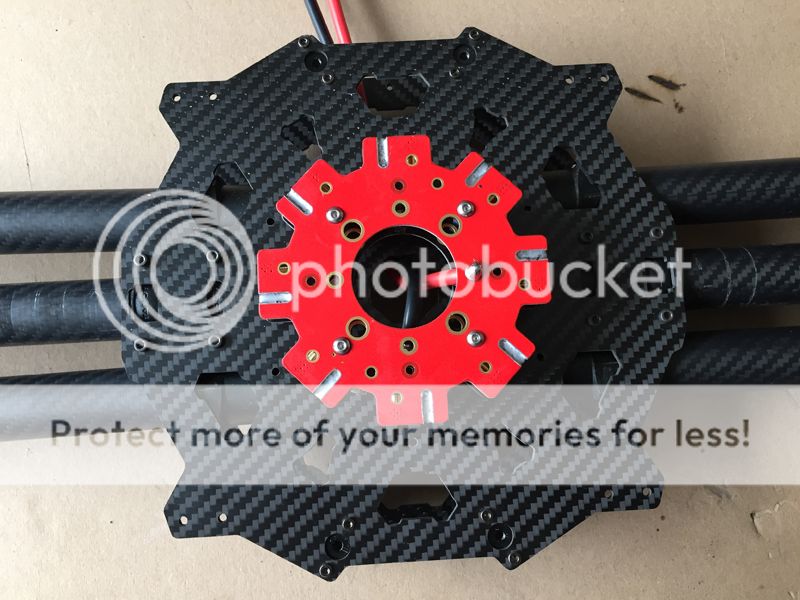
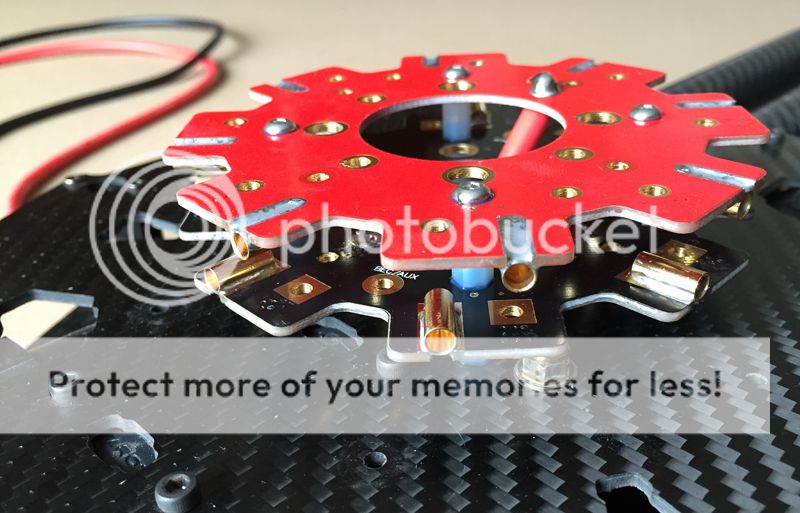
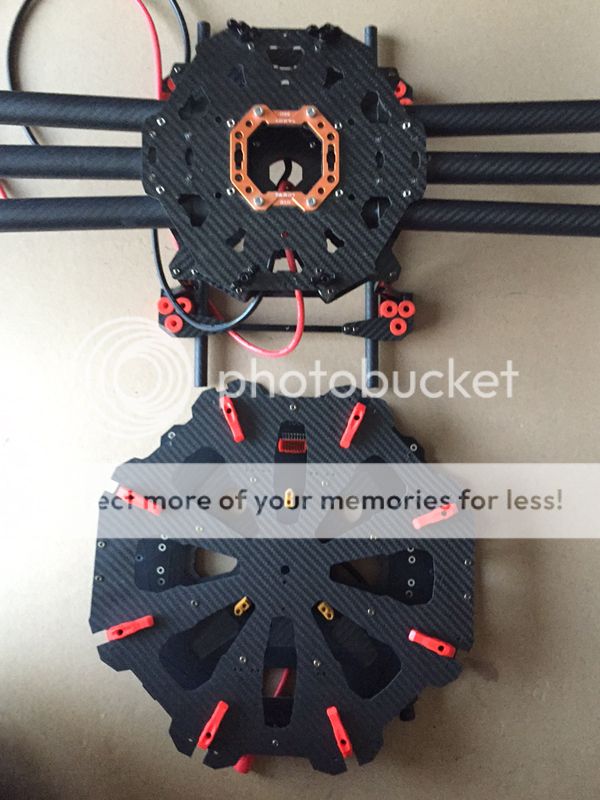
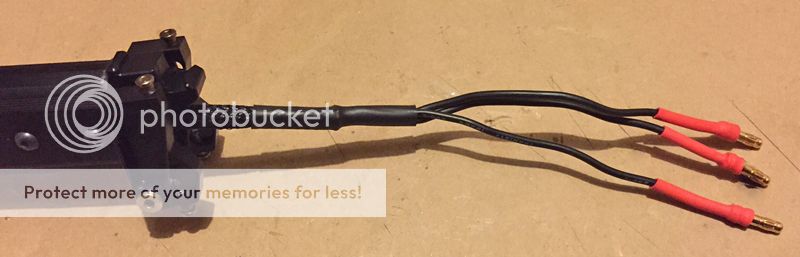
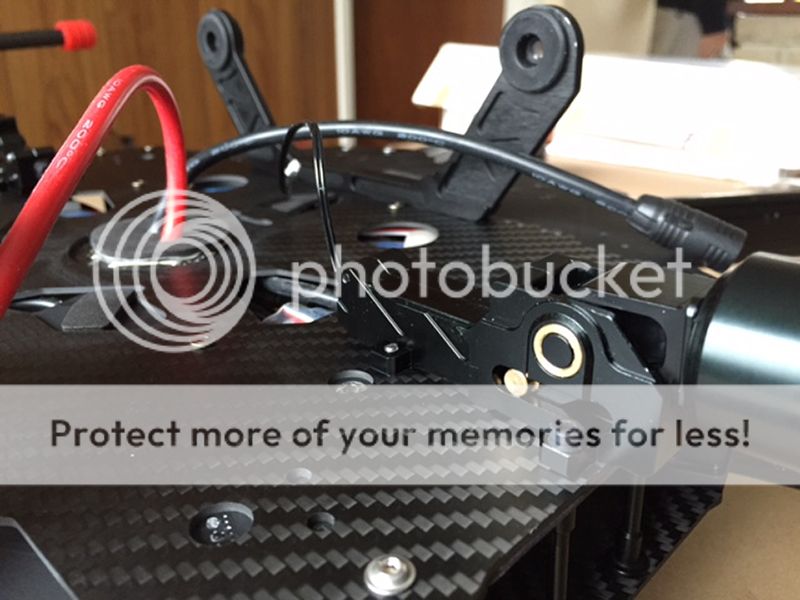
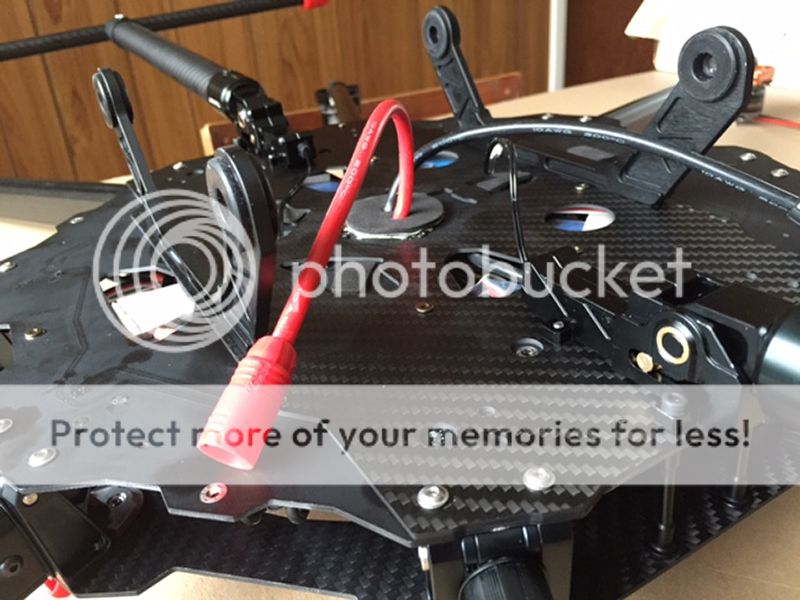
So the frame has been stripped of all its bits and bobs and wiring as I'm going to wire it better than it was, 1 reason for choosing the Tarot 960 frame is that being carbon fibre its very light and very very strong, and it can be closed up for transportation. Pics Below.
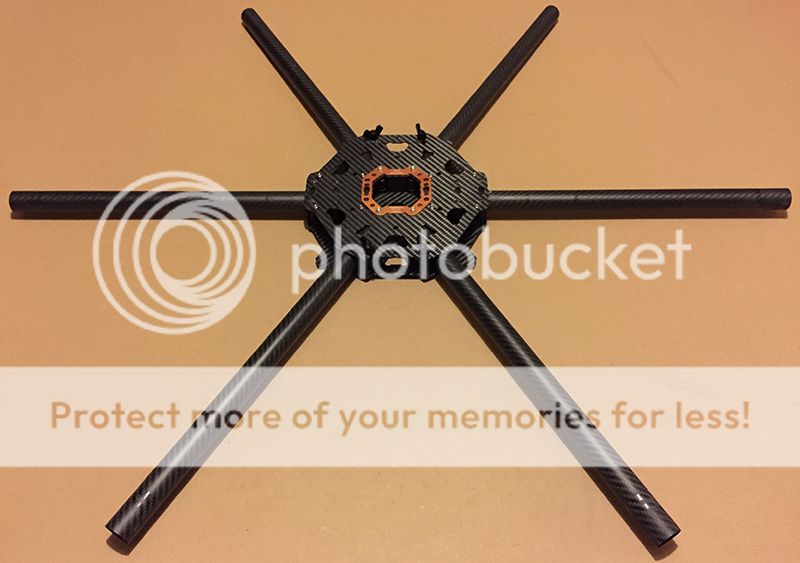

Link to Frame - http://tarot-rc-heli.com/Tarot-RC-M...i-Kits/Tarot_RC_T960_Multirotor_Copter_1000mm
On to the battery side of things I decided upon 1 large battery, instead of 2 smaller ones, as a survey of current users said you get longer in the air with the larger capacity battery.
Now charging a large LiPo battery is not as straight forward as bunging it on a charger and coming back 2 days later. the dedicated chargers and the current required to charge the battery is not small.
So as most chargers require a Dc voltage of between 10-30vDc sum up to 50vDC, a large power supply is required, 2 routes easily available are buy a charger and power supply readily available, or buy the charger and convert a Server power supply as these can deliver the current required. I got a server supply capable of delivering 12vDC and 175A but just couldn't live with the noise generated by the fans, so after some hunting around found a 12-24vDC variable 60A (1200W) power supply, and i coupled this with a charger, the iCharger 308DUO capable of charging 2 channels at a total of 1300W, the battery that got the most very good feedback and is respected in the heavy lift multicopter circle is the Gens Ace Tattu range, where i purchased the 16000mah 6S (22.2v) battery. If you think photography is expensive, time to think again.
Link to Power Supply - http://www.ev-peak.com/Titan_1200w.html
Link to Charger - http://www.progressiverc.com/icharger-308duo.html
Link to Battery - http://www.genstattu.com/tattu-16000mah-15c-6s1p.html
My plan is to keep updating the thread as the build goes on if there is interest in this.
Mark
PART 1 - https://www.talkphotography.co.uk/threads/uav-drone-hexacopter-build.581675/
PART 2 - https://www.talkphotography.co.uk/threads/uav-drone-hexacopter-build.581675/#post-6770366
PART 3 - https://www.talkphotography.co.uk/threads/uav-drone-hexacopter-build.581675/#post-6827723
PART 4 - https://www.talkphotography.co.uk/threads/uav-drone-hexacopter-build.581675/#post-6827738
PART 5 - https://www.talkphotography.co.uk/threads/uav-drone-hexacopter-build.581675/#post-6836017
PART 6 - https://www.talkphotography.co.uk/threads/uav-drone-hexacopter-build.581675/#post-6844559
PART 7 - https://www.talkphotography.co.uk/threads/uav-drone-hexacopter-build.581675/#post-6848164
PART 8 - https://www.talkphotography.co.uk/threads/uav-drone-hexacopter-build.581675/#post-6861691
PART 9A - https://www.talkphotography.co.uk/threads/uav-drone-hexacopter-build.581675/#post-6901031
PART 9B - https://www.talkphotography.co.uk/threads/uav-drone-hexacopter-build.581675/#post-6901033
PART 10A - https://www.talkphotography.co.uk/t...updated-11-june-15.581675/page-2#post-6909202
PART 10B - https://www.talkphotography.co.uk/t...updated-11-june-15.581675/page-2#post-6909204
PART 11 - https://www.talkphotography.co.uk/t...updated-17-june-15.581675/page-2#post-6919470
I have been looking at UAV or Drones or Multicopters for a while now, and after what has felt like an age doing research etc, I am now ready to start the build,
I have decided upon a Hexacopter (6 motors), this gives me a great power to weight ratio and stability, and has to be capable of carrying large battery, gimbal and a Canon 5D2 with 24mm f2.8 IS USM lens, Im not building it primerally for video or I would have chosen a smaller frame and either a go pro or Black magic camera, I want to use it for photography as well.
So I got the chance to buy a Tarot 960 complete with motors, Esc, wiring, retractabe legs, DJI Naza M v2 flight controller and GPS, props etc for a whole let less than buying new, this has been stripped and the DJI Naza M v2 will be changed for the DJI Wookong M, this will enable me to fit the fantastic DJI Zenmuse Z15-5D Gimbal.
So the frame has been stripped of all its bits and bobs and wiring as I'm going to wire it better than it was, 1 reason for choosing the Tarot 960 frame is that being carbon fibre its very light and very very strong, and it can be closed up for transportation. Pics Below.
Link to Frame - http://tarot-rc-heli.com/Tarot-RC-M...i-Kits/Tarot_RC_T960_Multirotor_Copter_1000mm
On to the battery side of things I decided upon 1 large battery, instead of 2 smaller ones, as a survey of current users said you get longer in the air with the larger capacity battery.
Now charging a large LiPo battery is not as straight forward as bunging it on a charger and coming back 2 days later. the dedicated chargers and the current required to charge the battery is not small.
So as most chargers require a Dc voltage of between 10-30vDc sum up to 50vDC, a large power supply is required, 2 routes easily available are buy a charger and power supply readily available, or buy the charger and convert a Server power supply as these can deliver the current required. I got a server supply capable of delivering 12vDC and 175A but just couldn't live with the noise generated by the fans, so after some hunting around found a 12-24vDC variable 60A (1200W) power supply, and i coupled this with a charger, the iCharger 308DUO capable of charging 2 channels at a total of 1300W, the battery that got the most very good feedback and is respected in the heavy lift multicopter circle is the Gens Ace Tattu range, where i purchased the 16000mah 6S (22.2v) battery. If you think photography is expensive, time to think again.
Link to Power Supply - http://www.ev-peak.com/Titan_1200w.html
Link to Charger - http://www.progressiverc.com/icharger-308duo.html
Link to Battery - http://www.genstattu.com/tattu-16000mah-15c-6s1p.html
My plan is to keep updating the thread as the build goes on if there is interest in this.
Mark
PART 1 - https://www.talkphotography.co.uk/threads/uav-drone-hexacopter-build.581675/
PART 2 - https://www.talkphotography.co.uk/threads/uav-drone-hexacopter-build.581675/#post-6770366
PART 3 - https://www.talkphotography.co.uk/threads/uav-drone-hexacopter-build.581675/#post-6827723
PART 4 - https://www.talkphotography.co.uk/threads/uav-drone-hexacopter-build.581675/#post-6827738
PART 5 - https://www.talkphotography.co.uk/threads/uav-drone-hexacopter-build.581675/#post-6836017
PART 6 - https://www.talkphotography.co.uk/threads/uav-drone-hexacopter-build.581675/#post-6844559
PART 7 - https://www.talkphotography.co.uk/threads/uav-drone-hexacopter-build.581675/#post-6848164
PART 8 - https://www.talkphotography.co.uk/threads/uav-drone-hexacopter-build.581675/#post-6861691
PART 9A - https://www.talkphotography.co.uk/threads/uav-drone-hexacopter-build.581675/#post-6901031
PART 9B - https://www.talkphotography.co.uk/threads/uav-drone-hexacopter-build.581675/#post-6901033
PART 10A - https://www.talkphotography.co.uk/t...updated-11-june-15.581675/page-2#post-6909202
PART 10B - https://www.talkphotography.co.uk/t...updated-11-june-15.581675/page-2#post-6909204
PART 11 - https://www.talkphotography.co.uk/t...updated-17-june-15.581675/page-2#post-6919470
Last edited:
")